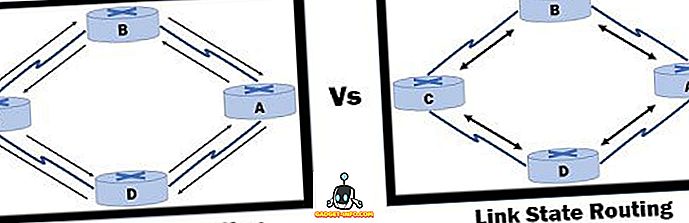
Предыдущее различие между вектором расстояния и маршрутизацией состояния канала состоит в том, что при маршрутизации вектора расстояния маршрутизатор делится знаниями всей автономной системы, тогда как при маршрутизации состояния канала маршрутизатор делится знаниями только своих соседних маршрутизаторов в автономной системе.
Сравнительная таблица
| Основа для сравнения | Расстояние векторной маршрутизации | Маршрутизация состояния канала |
|---|---|---|
| Алгоритм | Bellman Ford | Dijsktra |
| Вид сети | Информация о топологии с точки зрения соседа | Полная информация о топологии сети |
| Расчет лучшего пути | На основе наименьшего количества прыжков | На основании стоимости |
| Обновления | Полная таблица маршрутизации | Обновления состояния ссылок |
| Частота обновлений | Периодические обновления | Триггерные обновления |
| Процессор и память | Низкое использование | интенсивный |
| Простота | Высокая простота | Требуется обученный сетевой администратор |
| Время схождения | умеренный | Быстро |
| Обновления | В эфире | На многоадресной рассылке |
| Иерархическая структура | нет | да |
| Промежуточные узлы | нет | да |
Определение расстояния векторной маршрутизации
При маршрутизации с вектором расстояния маршрутизатору не требуется знать полный путь к каждому сегменту сети; требуется только знать направление или вектор, в котором нужно отправить пакет. Методика определяет направление (вектор) и расстояние (количество переходов) до любой сети в межсетевом пространстве.
Алгоритмы маршрутизации с вектором расстояний периодически отправляют все или часть своей таблицы маршрутизации соседним соседям. Маршрутизаторы, использующие протокол векторной маршрутизации, будут автоматически отправлять периодические обновления, даже если в сети нет изменений.
Маршрутизатор может проверить все известные маршруты и изменить свою таблицу локальной маршрутизации на основе обновленной информации, полученной от соседней маршрутизации. Этот процесс называется «маршрутизацией по слухам», поскольку информация о маршрутизации, имеющаяся у маршрутизатора в топологии сети, основана на перспективе таблицы маршрутизации соседнего маршрутизатора.
RIP и IGRP - это широко используемый протокол векторов расстояний, который использует количество переходов или его метрики маршрутизации.
Определение маршрутизации состояния канала
В маршрутизации состояния канала каждый маршрутизатор пытается создать свою собственную внутреннюю карту топологии сети. На начальном этапе запуска, когда маршрутизатор становится активным, он отправляет сообщения в сеть и собирает информацию от маршрутизаторов, к которым он непосредственно подключен. Он также предоставляет информацию о том, активна ли ссылка для доступа к маршрутизатору или нет. Эта информация используется другими маршрутизаторами для построения карты топологии сети. Затем маршрутизатор использует карту, чтобы выбрать лучший путь.
Протоколы маршрутизации состояния канала быстро реагируют на изменения сети. Он отправляет инициированные обновления, когда происходит изменение сети, и отправляет периодические обновления через длительные интервалы времени, например, 30 минут. Если ссылка изменяет состояние, устройство, обнаружившее изменение, генерирует и распространяет сообщение обновления, касающееся этой ссылки, на все маршрутизаторы. Затем каждый маршрутизатор берет копию сообщения об обновлении и обновляет свою таблицу маршрутизации и пересылает сообщение всем соседним маршрутизаторам.
Это переполнение сообщения об обновлении необходимо для того, чтобы все маршрутизаторы обновили свою базу данных перед созданием таблицы маршрутизации обновлений, отражающей новую технологию. Протокол OSPF является примером маршрутизации состояния канала.
Основные различия между маршрутизацией на основе вектора расстояния и маршрутизацией в состоянии соединения
- Алгоритм Беллмана-Форда используется для выполнения маршрутизации вектора расстояния, тогда как Dijsktra используется для выполнения маршрутизации состояния канала.
- При векторной маршрутизации расстояния маршрутизаторы получают топологическую информацию с точки зрения соседей. Наоборот, при маршрутизации состояния канала маршрутизатор получает полную информацию о топологии сети.
- Маршрут с вектором расстояния вычисляет лучший маршрут на основе расстояния (наименьшее количество прыжков). В отличие от этого, маршрутизация состояния соединения вычисляет лучший маршрут на основе наименьшей стоимости.
- Маршрутизация состояния соединения обновляет только состояние связи, тогда как маршрутизация вектора расстояния обновляет полную таблицу маршрутизации.
- Частота обновления в обоих методах маршрутизации - это разное обновление вектора расстояния, в то время как частота обновления состояния линии связи использует инициируемые обновления.
- Использование ЦП и памяти при маршрутизации с вектором расстояния ниже, чем при маршрутизации состояния канала.
- Маршрутизация вектора расстояния проста в реализации и управлении. В отличие от этого, маршрутизация состояния канала является сложной и требует обученного сетевого администратора.
- Время сходимости при маршрутизации векторов расстояний медленное и обычно страдает от проблемы счета до бесконечности. Наоборот, время сходимости при маршрутизации состояния канала является быстрым и более надежным.
- Вектор расстояний не имеет иерархической структуры, в то время как при маршрутизации состояния соединения узлы могут иметь иерархическую структуру.
Заключение
При маршрутизации с вектором расстояния общая доля маршрутизации позволяет передавать информацию всей автономной системы и информацию только соседям. С другой стороны, при маршрутизации состояния канала маршрутизаторы обмениваются знаниями только о своих соседях, а информация передается всем маршрутизаторам.